
Nome: Mamute
Ano: 2012
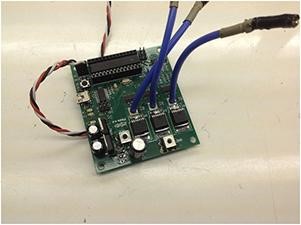
Projeto: Com o intuito de acompanhar a evolução da Equipe e substituir o projeto Middle, foi projetada a placa Mamute 1.1 destinada aos robôs das categorias Middleweight (55 kg) e Lightweight (27 kg), a fim de torna-las mais confiáveis, com menor necessidade de manutenção.
Por causa dos altos picos de corrente que podem ultrapassar os 200 A, essa é a única, das novas eletrônicas, que controla somente um motor e utiliza MOSFETs na parte de potência. Os MOSFETs utilizados suportam até 240 A, sendo os mais potentes dentre seus semelhantes. Também neste projeto foi adicionada programação on-board do micro controlador, cristal de 20MHZ, utilização de cooler, parafusos para conector anel, filtro PI e circuito SNUBBER.

O projeto foi lançado na Robogames 2012, onde se mostrou eficiente e ao mesmo tempo bem confiável. Buscando a evolução do projeto, a Equipe já começou a pensar em sua otimização para solucionar pequenos problemas apresentados durante a competição.
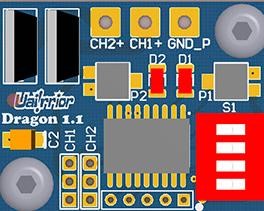
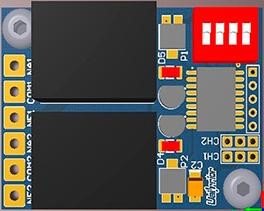
Nome: Dragon
Ano: 2012
Projeto: A Equipe Uai!rrior é a favor da inovação e do aprimoramento tecnológico. Assim que a utilização de fogo foi permitida nas competições brasileiras da Robocore, em 2012, a equipe foi em busca de eletrônicas que fizessem o acionamento do fogo, para termos uma base ao desenvolvimento de nossa própria eletrônica. A partir do Summer Challenge 2012 a equipe Uai!rrior foi a única a utilizar lança chamas inteiramente desenvolvido pela própria equipe, o que foi possível com a eletrônica Dragon.
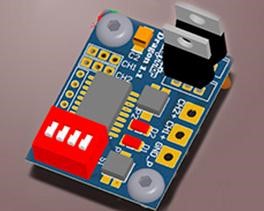

Essa eletrônica é muito versátil, e pode ser usada em diversas aplicações, já que foi desenvolvida para o acionamento de solenoides e resistências (periféricos responsáveis pelo lança-chamas). Sua primeira versão foi feita com dois relés eletromecânicos, um para acionar a válvula que libera ou não o gás e o outro para acionar ou não a resistência para ignição da chama.
No momento em que o piloto do robô aciona o lança chamas pelo rádio controle, o ignitor é ativado, e após alguns segundos, ajustados por software ou na própria placa eletrônica, o gás é liberado. Como o ignitor fica incandescente, o gás entra em combustão. Alguns segundos após o gás ser liberado, o ignitor é desligado. A chama ficará acesa até que o piloto “desligue” o lança chamas.
O primeiro robô em que essa eletrônica foi utilizada competia na categoria Middleweight, conhecido como A Besta. A eletrônica Dragon viria a ser utilizada novamente em um projeto inteiramente novo, e ressurgiu, só que desta vez no robô General, que fez sua estreia na Olimpíada Mundial de Robótica de 2013, a Robogames, conquistando o vice campeonato mundial na categoria middleweight.
Nome: Fênix
Ano: –
Projeto: Com o constante desenvolvimento dos projetos da equipe nos deparamos com um problema, o espaço interno dos robôs vem diminuindo, e com isso surgiu a necessidade de utilizar um tipo de motor diferente para o acionamento de nossas armas.
O motor brushless veio para suprir nossa necessidade, porém o acionamento e o controle desse motor não são tão simples. Para se ter uma ideia do quão complexo é esse tipo de motor, ainda não há uma eletrônica de fabricação nacional que permita o correto controle de tal motor, o que aumenta os custos de produção do projeto, já que temos que comprar essa eletrônica, e não desenvolvê-la.
Com o objetivo de suprir as necessidades da equipe nessa área, surgiu a Eletrônica Fênix. Trata-se de uma plataforma de desenvolvimento, onde os membros da Equipe, na área de eletrônica, estudam, realizam testes e desenvolvem uma eletrônica de acionamento de motores brushless.
Essa eletrônica é bem robusta, suportando picos de corrente de até 200A. Os MOSFET´S utilizados nela são os mesmos da Mamute, já consagrada eletrônica de controle que foi empregada muitos anos nos robôs das categorias Featherweight, Lightweight e Middleweight.
Nome: Grifo
Ano: –
Projeto:
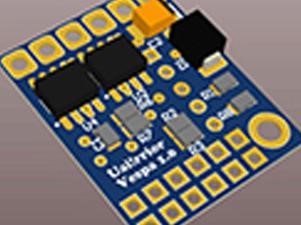
Com a evolução da categoria Beetleweight, a eletrônica Vespa não supria mais a corrente necessária aos motores de locomoção dos robôs. Logo era preciso o desenvolvimento de uma nova eletrônica, denominada Grifo 1.0.
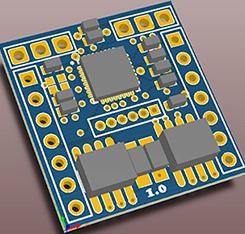
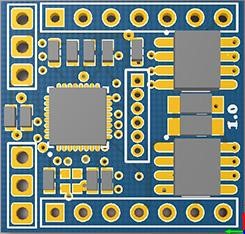
Para o chaveamento da Grifo, utilizou-se MOSFET’s que suportam até 15A contínuos e de pequeno encapsulamento. Uma novidade para a Equipe, foi que este componente utiliza-se da solda BGA.
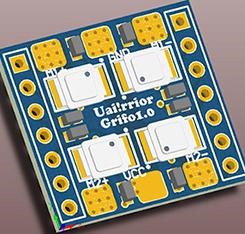
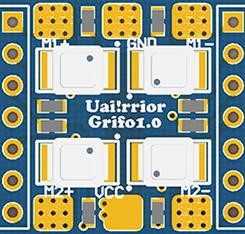
Devido ao espaço muito limitado dos robôs da categoria Beetleweight, a solução foi voltar às eletrônicas sanduíches, assim, duas placas foram projetadas, uma para a parte de potência e outra para o controle, ambas conectadas por uma barra de pinos. Dessa forma foi possível projetar uma eletrônica de 21×22[mm] de comprimento.
Nome: Rino
Ano: 2013
Projeto: A eletrônica Rino foi desenvolvida com o objetivo de substituir as eletrônicas Gorila e Javali. Estas apresentavam problemas com os drivers de ponte H, que sofriam estresses devido a picos de corrente recorrentes do uso durante os combates, ocasionando a queima dos componentes.


A eletrônica Rino é utilizada em robôs das categorias Hobbyweight, onde competem robôs de até 5,44 kg, Featherweight, de até 13,6 kg, e Hockey-Pro, de 6,8 kg. Essa eletrônica controla dois motores DC e tem circuito similar ao da eletrônica Mamute. É formada por um microcontrolador que recebe o sinal do receptor conforme instruções do controle feitas pelo piloto e, através de drivers capazes de chavear duas pontes H completas, alimentam através de MOSFET´s os motores de locomoção.

Fez sua estreia na Winter Challenge 2013 e desde então vêm se mostrado eficiente e confiável, por suportar níveis de corrente de até 240 A, leve e compacta, com dimensões de 59×60[mm], se adequa muito bem às necessidades das categorias em que é utilizada.
Nome: T-REX
Ano: 2013
Projeto: A T-REX é uma eletrônica que foi usada na arma dos robôs das categorias Lightweight e Middleweight, os robôs Federal M.T. e General respectivamente. A T-REX veio para substituir a eletrônica Arma 2.1, eletrônica que não era confiável, pois em alguns rounds os MOSFET’s queimavam em “aberto”, disparando a arma, sendo assim era necessário um novo projeto que suprisse os problemas da antiga eletrônica.
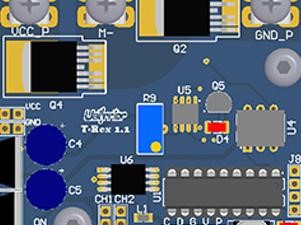

No novo projeto, os MOSFET´s do tipo discretos foram trocados por SMD’s. Também foram acrescentados dois MOSFET´s, com essa mudança, seus diodos internos, também chamados de diodos de Freewhelling, foram utilizados para a proteção da eletrônica contra picos de tensão do motor causados pela força contra eletromotriz

Quando o mecanismo da arma sofre algum dano, ocorre um pico de corrente, que aplicada em um longo período pode queimar o motor. Para evitar que isso ocorra realiza-se um sensoriamento, que corta a alimentação da arma, evitando assim danos maiores.
A T-REX tem dimensão de 60 x 52,5[mm] e foi utilizada nas seguintes competições: Summer Challenge 2012, RoboGames 2013 e Winter Challenge 2013 e essa funcionou perfeitamente em todas as competições, não sendo detectados problemas de nenhuma espécie.
Nome: Telemetria
Ano: –
Projeto: A Telemetria é uma tecnologia responsável pelo controle à distância dos eventos que ocorrem em uma máquina durante seu funcionamento. Basicamente é uma técnica de obtenção, processamento e transmissão de dados. Através da telemetria você pode monitorar tudo o que está acontecendo internamente na sua máquina, como a corrente que está sendo enviada para os motores, a tensão da bateria, etc. É uma tecnologia bastante utilizada em esportes automobilísticos e, além disso, está sendo largamente utilizada nas indústrias de transportes.
Para a equipe Uairrior a Telemetria é uma eficiente forma de ter um controle de informação mais preciso do que acontece internamente com os robôs durante o combate, trazendo assim maior segurança e confiança para a equipe, que poderá verificar em tempo real o seu funcionamento. Assim, com a utilização dessas informações poderemos checar quais os problemas, ou possíveis problemas que podem vir a ocorrer e evitá-los ou solucioná-los da melhor forma possível.
Logicamente o piloto terá acesso a estas informações e elas ditam quais atitudes ele deve tomar durante o combate.
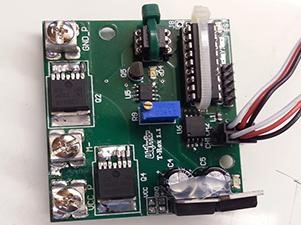
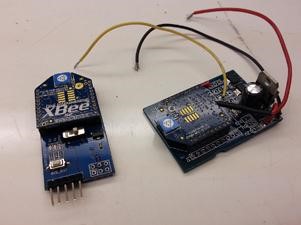
Basicamente a Telemetria da Uairrior tem como objetivo fazer o monitoramento das correntes das locomoções e da arma e também informar a tensão da bateria. Esta comunicação é feita da seguinte forma: existe uma eletrônica projetada pela própria Equipe que fica conectada a sensores de janela hall, desta forma, os cabos de energia que vão para o motor passam por este sensor e ele identifica qual a corrente que está passando para que ele possa enviar para a eletrônica as informações.
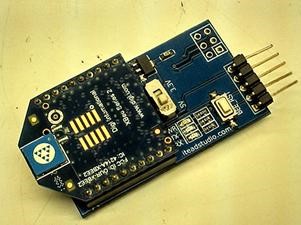

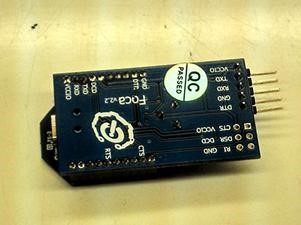
Portanto a eletrônica projetada fica responsável por ler este sinal e amplificá-lo. Uma vez feito isso, o sinal amplificado é enviado para o shield XBee e será ele o responsável por fazer a comunicação sem fio com o software de monitoramento. Esta comunicação é relativamente simples. O shield conectado na eletrônica Telemetria envia o sinal (sem fio) para outro shield XBee, este segundo é conectado a uma terceira eletrônica que converte o sinal de formato serial para ser lido em uma porta USB.
É através desta porta USB que o computador receberá as informações finais sobre a corrente. Estas informações são enviadas para um software (também desenvolvido pela Equipe) que além de apresentar os gráficos referentes às correntes e a tensão da bateria, também recebe imagens de uma câmera de vídeo que grava em tempo real a luta, isso é importante para que o responsável pelo monitoramento possa saber o que está provocando as variações na corrente.
Enfim, é fácil perceber o quão vantajosas são estas informações, sobretudo para o piloto, que terá muito mais segurança durante o combate e tomará as atitudes certas no momento certo.
Podemos concluir que a telemetria é uma tecnologia que traz muito mais confiança e segurança, além de fornecer um amplo conhecimento sobre a máquina com que se está trabalhando o que é extremamente importante e eficaz, ainda mais se tratando da Guerra de Robôs, já que durante uma luta diversas coisas podem acontecer com o robô e é necessário estar preparado para qualquer problema possível. Afinal, como dizem: “nunca se sabe o que pode acontecer dentro da arena”.
Nome: Vespa
Ano: 2012
Projeto: A Equipe, visando ampliar a sua área de atuação, decidiu participar nas categorias de combate Antweight (0,454 g) e Beetleweight (1,36 kg), e como o principal obstáculo encontrado nestas modalidades é o pequeno espaço e o limite de peso, foi criado o projeto Vespa, que com apenas 20×25 mm de comprimento, tem capacidade de controlar 2 motores de corrente contínua.
Buscando minimizar e otimizar o projeto , após uma série de pesquisas feitas pela equipe, foi utilizado encapsulamento SOIC do microcontrolador PIC16F628A, contribuindo para a redução do tamanho desta eletrônica. Por utilizarem motores pequenos e de baixo consumo de corrente, é possível utilizar circuitos integrados de ponte completa para fazer a parte de potência da placa, para a Vespa a equipe optou por um CI SMD que controla um motor e tem corrente máxima de 3,5A, quantia suficiente para estes pequenos combatentes.

Com o intuito de competir também nas categorias autônomas, foram colocados pinos para a conexão de sensores externos na eletrônica, assim sendo a primeira capaz de ser utilizada, tanto nas categorias rádio controladas, como nas autônomas.
Sua estreia foi na RoboGames 2012, atingindo todas as expectativas da Equipe e trazendo um título mundial com o robô Carrapato na categoria autônoma, mostrando assim o grande potencial da eletrônica da Equipe.
Nome: Gorila
Ano: 2012
Projeto:
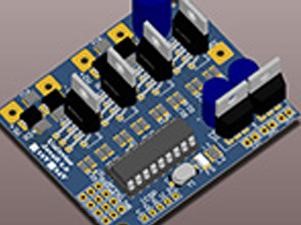
Visando simplificar e inovar os projetos de eletrônica anteriores das categorias Hobbyweight (5,5kg), Hockey (6,8kg) e Featherweight (13,6kg) foram criadas as eletrônicas Javali 1.0 e Gorila 1.0, sendo que ambas apresentam exatamente o mesmo circuito esquemático, para controlar dois motores simultaneamente, há porém algumas diferenças no layout e no tamanho da placa, pois são destinadas a robôs com consumo de correntes diferentes.
Algumas das novidades foram: o filtro PI para filtragem e retirada de ruídos na alimentação da área de controle da placa, circuito SNUBBER em paralelo com os motores para proteção dos CI´s durante o funcionamento, reduzindo picos de corrente induzida, utilização de dissipadores de calor nos CI´s de potência para evitar seu aquecimento excessivo durante os rounds, programação on-board do microcontrolador e cristal de 20MHZ para o mesmo.
Para suportar o estresse excessivo, as eletrônicas são baseadas em um CI de meia ponte H com característica de suportar correntes de até 70 A, possuindo proteção contra curto circuito, sobrecorrentes e sobretemperatura, assim podendo substituir os MOSFETs que eram usados nos projetos anteriores.
Destinada aos Robôs da categoria Hockey (6,8kg) e Featherweight (13,6kg), possui um tamanho total de 71.1 x 64.5 mm com altura de 43 mm. Para suportar maior consumo de corrente e maior estresse, essa eletrônica apresenta planos de potência com maior largura. Foram colocados parafusos para utilização de conector anel nos fios de conexão com bateria e motores, o que facilita a instalação e manutenção dos robôs. Também foi adicionada fixação para utilização de cooler sobre a placa, melhorando a refrigeração dela como um todo.

Com a difícil tarefa de manter o título mundial na categoria Hockey, a eletrônica Gorila 1.0 foi usada pela primeira vez na RoboGames 2012, onde apresentou excelente desempenho, o que ficou claro com a conquista do bicampeonato mundial com a Equipe Cálculos Hockey Team.
Nome: Javali
Ano: 2012
Projeto:
Alguns aspectos da placa foram mencionados da descrição da Gorila, portanto, as informações presentes aqui são específicas da eletrônica Javali.
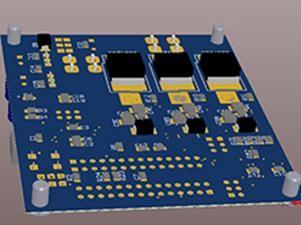
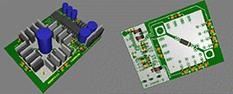
Destinada aos robôs da categoria Hobbyweight (5,5 kg), possui um tamanho reduzido (60 x 51 mm), planos de potência com menor espessura e conexões na área de potência para soldagem dos fios de conexão, para bateria e motores utilizados, que consomem menos de 25 A nesta categoria.
Segue a visão em 3D do projeto:
Sendo a eletrônica mais evoluída para a categoria Hobbyweight, o projeto Javali 1.0 estreou na RoboGames 2012, onde apresentou um ótimo desempenho, atingindo todas as expectativa da Equipe.
Nome: 3X4
Ano: –
Projeto: Com a diminuição do espaço interno do robô surgiu a necessidade de adaptar uma eletrônica que fosse menor e controlasse os motores com eficiência e confiabilidade. Diante disso, foram avaliadas várias formas de diminuir o circuito e, dentre todas, aquela que se ajustou melhor foi encontrar um CI que substituísse a ponte H. Ela e todos seus componentes são responsáveis por cerca de 60% do tamanho total da placa eletrônica.
A ponte H é a estrutura eletrônica capaz de inverter o sentido de rotação do motor, sem que seja necessário inverter a polaridade da fonte de tensão, no caso, a bateria. Grosso modo, esta estrutura é composta por 4 chaves acionadas em pares, dispostas de forma semelhante à letra “H”, daí o nome ponte H. Na figura abaixo seu esquemático simplificado.
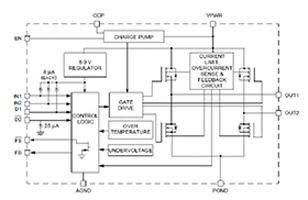
Mediante pesquisa, foi achado um CI que se adequava à corrente e tensão de operação do circuito, o MC33887. Além de possuir internamente uma ponte H, ele possui proteção contra corrente, tensão e temperatura acima das condições nominais. Ele é pequeno e seu encapsulamento é HSOP SMD de 20 pinos, fato que torna a layout menor ainda. Abaixo o seu diagrama de blocos simplificado.
Seguindo as especificações do datasheet do MC33887 e adaptando-o para o circuito de controle Uairrior, o circuito foi projetado e, em seguida, o layout da placa. Como o tamanho final da eletrônica foi (35×46) mm, esta foi apelidada de “Eletrônica 3×4”.
Na prática, esta placa funcionou como projetado; acionando dois motores com uma corrente de saída máxima de 5A. Como melhoria para a próxima placa, buscamos um CI com maior capacidade de corrente, já que esta tecnologia de Ponte H foi testada e aprovada.
Nome: Modular
Ano: 2010
Projeto: A eletrônica da Uairrior, ao longo dos anos de pesquisa e projeto, evoluiu de maneira significativa. Elaborada com componentes com grande capacidade de dissipar potência e circuitos sensores e de proteção que atuavam para diminuir ao máximo o efeito de sobretensões e sobrecorrentes. Porém, pela grande demanda de corrente e alta possibilidade de curto-circuitos causada por limalhas de metal, o circuito precisava de manutenção. Assim, surgiu a ideia de se fazer uma placa de fácil manutenção e reposição, que fosse pequena e confiável.
No projeto, para cada Ponte H comandando um motor existe um circuito de controle agregado. Como cada robô possui pelo menos dois motores, caso uma Ponte não funcionasse, o outro módulo não precisaria ser trocado, daí o nome Eletrônica Modular.
O circuito em si não foi alterado, apenas algumas proteções foram adicionadas como, por exemplo, o TVS (transient voltage suppressor), componente responsável por absorver picos de tensão. O tamanho das trilhas de cobre foi aumentado e, através de cálculos, foi constatado que seria necessário, no mínimo, 2 oz de espessura nas mesmas.
Com (80×58) mm, seu layout foi totalmente projetado no Ultiboard da National Instruments. A topologia dos componentes obedece a níveis de corrente, simetria, caráter visual e facilidade na manutenção.
Feita a princípio para robôs de 54,5 Kg, a Eletrônica Modular Uairrior já foi usada em um robô da categoria Featherweight de 13,6Kg, pelo tamanho reduzido e confiabilidade. Utilizada desde o Winter Challenge de 2010. A equipe vem trabalhando em mais circuitos de proteção e na melhoria do circuito de controle utilizado, trazendo cada vez mais este circuito para um patamar profissional. Com certeza é uma eletrônica para se levar de base para as atuais.
Nome: Mini
Ano: 2008
Projeto: A competição nacional de guerra de robôs cresceu com o passar dos anos, principalmente com a criação de novas categorias, como a hobbyweight (5,5kg), em 2007 e a featherweight (13,6kg), em 2008. A equipe Uairrior não poderia deixar de crescer junto com a competição e vencer mais esse desafio para a eletrônica.
Com o término do desenvolvimento de uma eletrônica completa para os robôs da categoria middleweight (54,5kg), a equipe se propôs a projetar uma miniaturização das placas, de modo que elas pudessem ser utilizadas nos robôs menores, mas mantendo a mesma confiabilidade já conquistada.

Alguns dos parâmetros a serem considerados foram o tamanho, que deveria ser compatível com a categoria do robô, a potência máxima, pois os motores iriam necessitar de uma potência menor, entre outros. Para tanto, a equipe decidiu utilizar componentes do tipo SMD (Dispositivos Montados em Superfície), alterar a parte lógica do controle e desenvolver um layout que englobasse as três placas em uma.

Iniciou-se então a fase de pesquisa, principalmente sobre quais componentes deveriam ser substituídos, em quais locais seria possível obter esses componentes, a compatibilidade com os componentes discretos, entre outras coisas. Com isso, foi possível montar um protótipo, testar o circuito e descobrir possíveis falhas.
Por fim, adequou-se o projeto da eletrônica aos dois robôs da equipe Uairrior que estavam em desenvolvimento no momento, o robô Butcher, da categoria hobbyweight, e o robô UFO, da categoria featherweight. Foram feitos vários ensaios, de modo a testar os limites das eletrônicas e verificou-se que estes circuitos poderiam ser utilizados com a confiabilidade que a equipe necessitava em seus projetos.
Utilizou-se a mini eletrônica no controle dos robôs UFO e Butcher no 4º Winter Challenge, ocorrido em Amparo, em julho de 2008, obtendo a 3º colocação na categoria featherweight, além do 3º lugar conquistado na categoria middleweight com a “eletrônica sanduíche”.
Nome: Sanduíche
Ano: 2007
Projeto:
Em 2007, após a conclusão do trabalho da placa de controle, a equipe Uairrior se concentrou na confecção da eletrônica de potência, que apresentava um maior grau de complexidade e envolvia um maior custo para o seu desenvolvimento.
Na época a equipe utilizava a placa OSMC (Open Source Motor Control) e havia estudado a fundo o seu funcionamento. Com isso, decidiu-se adequar o circuito desta placa à utilização da Uai!rrior, de modo a otimizar o projeto.
Após uma árdua pesquisa sobre quais componentes utilizar, quais modificações seriam feitas, entre outras coisas, optou–se pela utilização de transistores do tipo Mosfet de potência para o acionamento dos motores, proteção do circuito de controle e uma lógica diferente de acionamento do driver de potência.
Utilizou–se um Protoboard para fazer vários testes no circuito resultante e encontrar possíveis defeitos. Após alguns ajustes, obteve–se sucesso e com isso se iniciou uma nova fase na eletrônica: a confecção de um layout que atendesse a necessidade dos projetos desenvolvidos pela equipe.
Foram elaborados alguns protótipos para testes e correção dos possíveis erros. A Equipe utilizou um desses protótipos durante o 3º Winter Challenge, que ocorreu em 2006, na cidade de Amparo, afinal este é o melhor teste para encontrar possíveis defeitos que não poderiam ser simulados.
Assim, foram levantados os dados sobre os problemas encontrados na eletrônica após o evento, sendo que o principal problema estava relacionado com a comunicação entre as placas de controle e potência, devido à utilização de fios para este fim.
Foram realizadas pesquisas nesta área e por fim, a equipe encontrou uma solução: substituir o uso de cabos por conectores, de modo que as placas de potência fiquem conectadas diretamente a placa de controle. Como resultado cada uma das placas de potência passaram a se conectar a uma face da placa de controle, formando o que foi conhecido como “eletrônica sanduíche”.


Percebeu–se, após testes, que a comunicação não foi prejudicada e ainda houve uma melhora na resistência mecânica das placas. Foram realizadas novas simulações e testes que comprovaram a eficiência deste projeto e assim, este foi utilizado durante o 6º ENECA (Encontro Nacional de Estudantes de Controle e Automação), realizado em Curitiba – PR, em setembro de 2006.
Ainda assim, o projeto não estava finalizado. Foram desenvolvidas melhorias para oferecer maior confiabilidade ao projeto, sendo estas tanto relacionadas ao hardware como ao software da eletrônica, de modo a permitir que se utilizasse a potência máxima estimada na proposta inicial da equipe.
Deste modo, a equipe Uai!rrior finalizou seu projeto da eletrônica no ano de 2007, sendo este conhecido como “eletrônica sanduíche”, sendo assim umas das primeiras equipes a desenvolver uma eletrônica completa para a categoria middleweight (54,5kg) totalmente confiável e de fácil adequação aos projetos da equipe. Essa eletrônica nos forneceu muito conhecimento para aprimorar os projetos atuais
Nome: Controle
Ano: 2005
Projeto:
Visando melhorar os seus projetos, a equipe Uairrior iniciou em 2005 seu trabalho para a construção de uma eletrônica própria, que para proporcionar maior liberdade para a criação dos robôs, além de agregar grande conhecimento aos integrantes da Equipe.
De maneira a facilitar o trabalho, dividiu-se a eletrônica em duas partes: Potência e Controle, sendo que a equipe optou por iniciar o processo por esta última, devido a sua menor complexidade e custo de componentes envolvidos.
Foram feitos estudos e um levantamento de dados sobre os parâmetros deste projeto como, por exemplo, o sinal que seria enviado aos motores, a recepção do sinal do controle, entre outros. Com isso ficou decidida a utilização de um microcontrolador, mais precisamente o PIC 16F628.

A equipe concentrou seus esforços na programação do microcontrolador e no desenho do layout da placa de controle. Após esta fase, foram iniciados os testes no robô que estava em desenvolvimento pela Uairrior no momento, o Vingador.

esta fase de testes e aperfeiçoamento da eletrônica, o Vingador apresentou grandes problemas de interferência, causados principalmente pelo motor à combustão, utilizado na arma. Fez-se necessário a realização de vários testes para identificar o problema, a solução se deu após modificações na placa e, principalmente, no software do microcontrolador.
Após alguns ajustes, a eletrônica ficou finalmente pronta para ser utilizada no 1º Winter Challenge, em 2005, realizado em Campos do Jordão. A Equipe obteve a 2º colocação com o robô Vingador, transformando a Uairrior em uma das pioneiras nos projetos eletrônicos microcontrolados.